
Steuerung
Bauteile:
- Atmega16 Microcontroller
- LM7805 5V Spannungsregler
- MAX232CPE RS232 Pegelwandler
- Hühnerfutter (Widerstände, Kondensatoren, Quarzoszillator, Mosfets,..)
- Relais
- altes Navi Kabel-GPS
- altes Bluetooth GPS-Modul
- alter PocketPC
Vorhaben:
Da die Lenkung sowie Gas inzwischen elektrisch aber trotzdem nur „manuell“ steuerbar sind, war es naheliegend den nächsten Schritt zu tun. Ziel ist es schlussendlich eine Route vorgeben zu können welche dann selbständig abgefahren wird. Zwischenziel ist eine Microcontrollerschaltung aufzubauen mit zwei seriellen Verbindungen (einmal zum PocketPC und einmal zum GPS). Der Microcontroller übernimmt grundlegende Steueraufgaben, Hauptaufgabe ist aber den PocketPC mit den aktuellen Daten zu versorgen und auf Befehle vom PocketPC zu reagieren. (Lenkung, Gas etc.) Damit die Steuerung auch ohne Pocket-PC verwendbar ist, wird das derzeit für die Steuerung verwendete Steuerpanel beibehalten.
Auch die Bilgenpumpe wird autonom vom Microcontroller gesteuert ohne dass der PocketPC nötig ist. (Das Boot hat keine Abdeckung und muss deshalb bei Regenwetter öfters vom sich ansammelnden Wasser befreit werden)
Im Prinzip sollte der Microcontroller also alle Möglichkeiten zur Verfügung stellen (für den Pocket PC) und einfachere Aufgaben selber ausführen. (Bilgenpumpe..)
Komplexe Aufgaben wie Korrekturkursberechnung, Geschwindigkeitsanzeige, Routenplanung und nachfahren einer Route etc. wird der PocketPC erledigen.
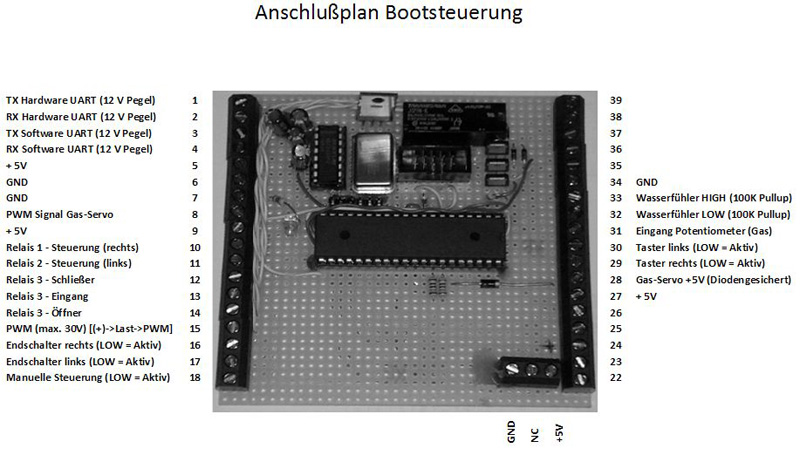
Geplanter Funktionsumfang der Microcontrollerschaltung:
- Bilgenpumpe steuern (2 Wasserstandsensoren) inkl. Überwachung der Maximallaufdauer der Pumpe
- PWM Generierung für das Steuersignal des Gas-Servos
- Möglichkeit zur Einstellung der Trimmung des Gas-Servos
- PWM Generierung für Geschwindigkeitsregulierung des Fensterhebermotors (Lenkung)
- Ansteuern der 2 Umpol-Realis für die Lenkung inkl. Überwachung der Anschlagsensoren und Abschaltung der entsprechenden Lenkrichtung wenn ausgelöst.
- Serielle Verbindung mit GPS-Modul und Weitergabe der GPS-Daten an den PocketPC
- Serielle Verbindung zum PocketPC, vorerst Kabelgebunden später evtl. per Bluetooth
- Auswertung der manuellen Steuereingaben falls ohne PocketPC gesteuert werden soll (Analogsignal Gas-Poti, links/rechts-Taster)
- Speichern der Einstellungen im EEPROM, sowie Ausgabe an den PocketPC und entgegennehmen von Einstellungen vom PocketPC
- Ausgabe der Zustände der Ein/Ausgänge und Register an den PocketPC
- Annahme von Befehlen vom PocketPC
- …
Geplanter Funktionsumfang des PocketPC´s:
- Einstellung und Auslesen aller Parameter der Steuersoftware im Microcontroller
- Bereitstellung von Reglern für die Gas und Lenkungssteuerung
- „Instrumentenbrett“ (Tacho, Position, Entfernung zu Wegpunkt, Kurs, etc.)
- GPS-Log für spätere Darstellung der Route in Google Earth o. ä.
- ..
Bilder:
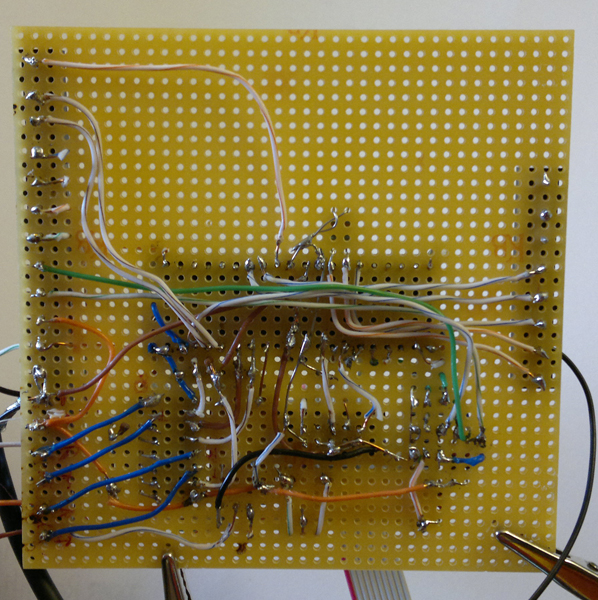
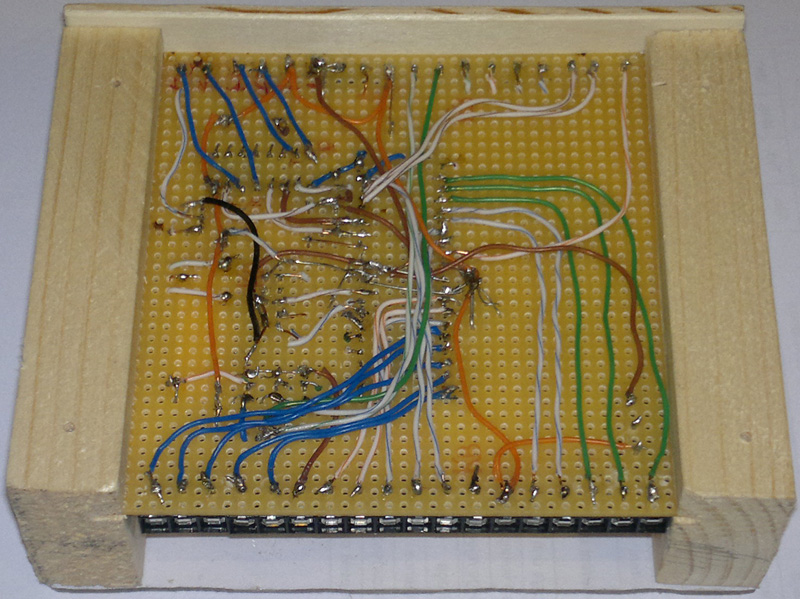
Prototyp der Steuerplatine (Rückseite)
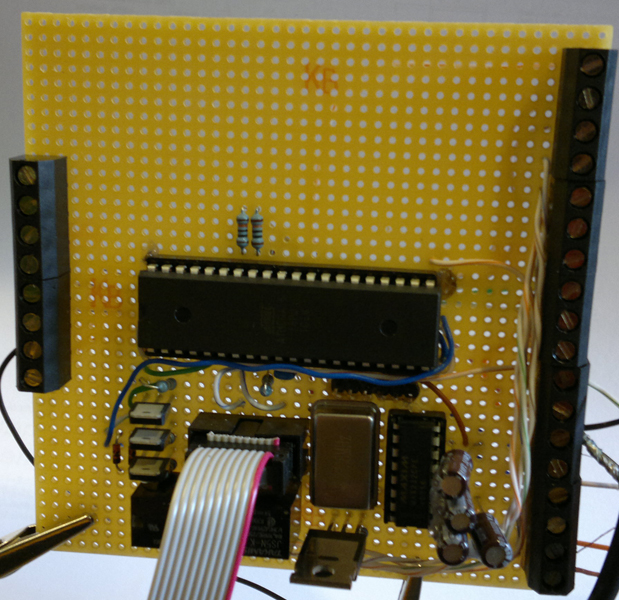
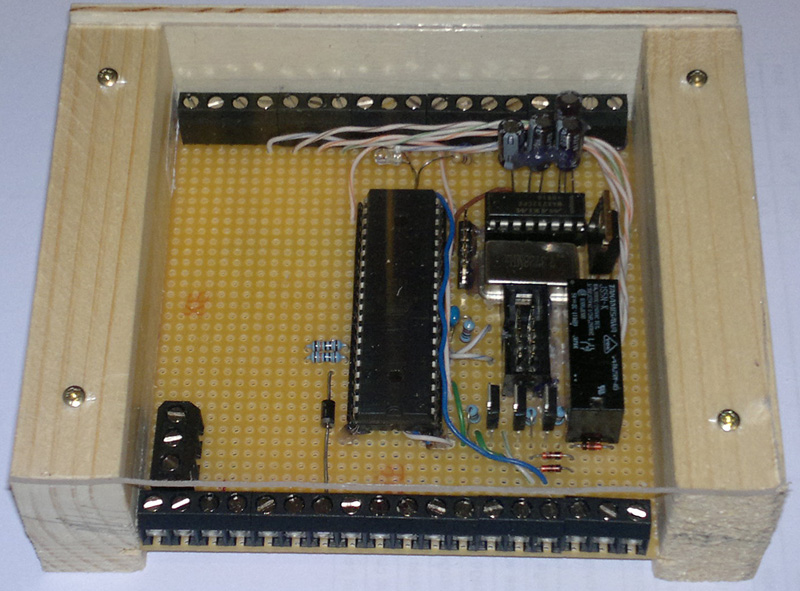
Steuerplatine mit grundlegenden Bauteilen
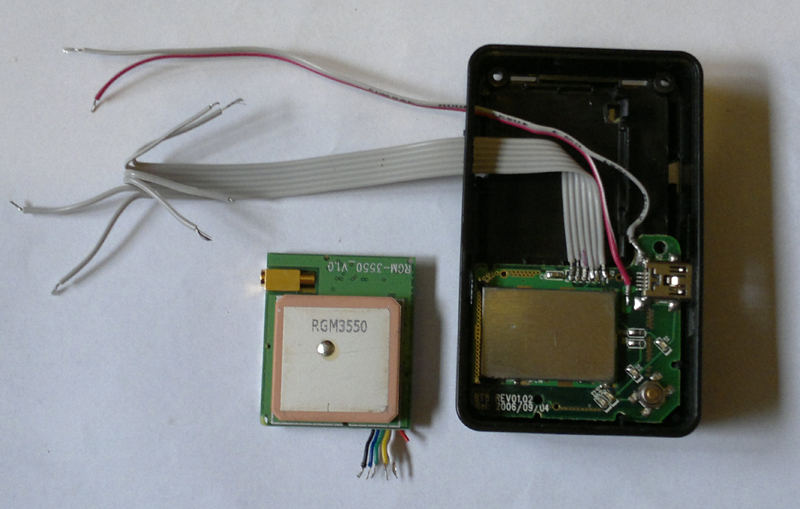
Ausgebautes GPS-Modul (links) und Originalgehäuse mit dem Bluetooth-Modul
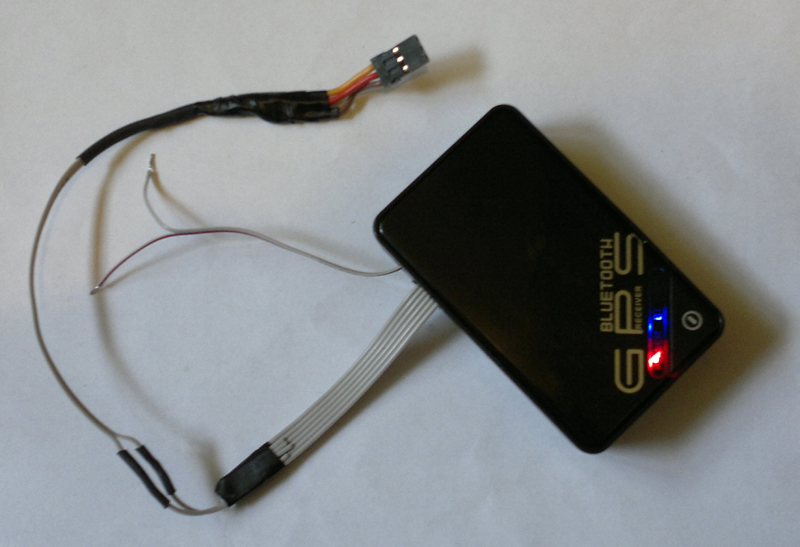
Zusammengebaut und mit Stecker mit eingebautem Spannungsteiler(einfache Pegelanpassung (5V zu 3,3V) versehen für einfacheren Anschluss an die Steuerplatine
BootSteuerung im Holzgehäuse mit Plexiglasabdeckung
BootSteuerung im Holzgehäuse mit Plexiglasabdeckung – Unterseite
Werkzeugvorbereitung für den Einbau der Steuerung 🙂

Kabelsalat par excellence..

Mobile Werkzeugecke auf dem Boot..
